Three Classes of Flow Controller
Class I
These are the simplest flow controllers mechanically. The differential pressure across the device acts on an area, which tends to move a piston. This force is opposed by a force which varies with position (normally a spring). The force due to pressure and the spring force determine the position of the piston. The piston is arranged next to some sort of seat, so that between them they form an opening: that opening is precisely tailored so that it gives the correct Cv for the target flow at the corresponding pressure.
| Advantages | Disadvantages |
| Full DP drives piston | Not Adjustable |
| No Seals Required | Porting Design Requires Expertise |
| Compact | |
| Reliable |

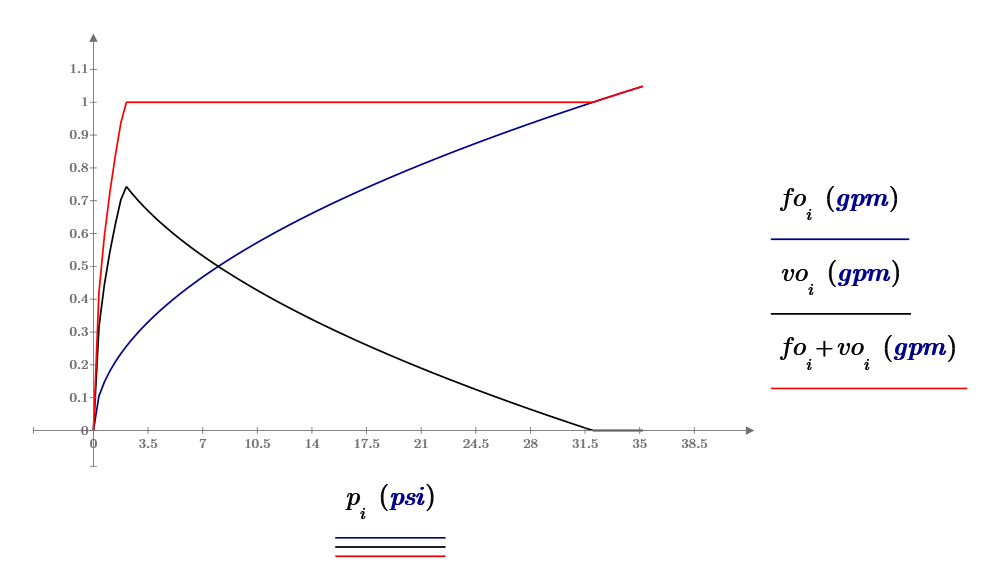
In the graph below, the trace “fo” shows the flow through fixed orifice, the trace “vo” shows the flow through the variable orifice, and then there is a trace adding them together to show the overall effect. In the case of the version shown above, the fixed orifice would be the flow around the piston plus the hole in the end of it. The variable orifice is the contoured shape in the side of the piston.
Class II
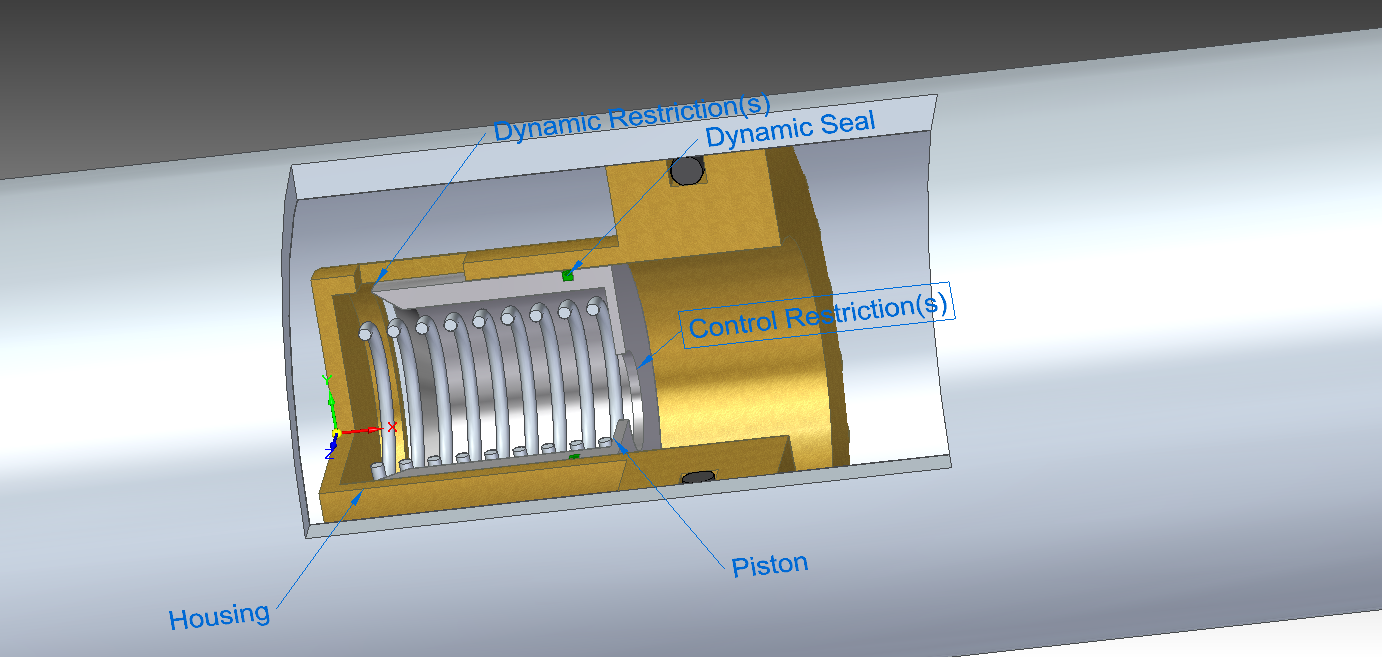
Class II flow controllers have a simple, direct acting differential pressure controller keeping a constant pressure across a control restriction. In other words, these have a control restriction which sets the flow rate, and a dynamic restriction which changes to maintain a constant pressure across the control restriction. The piston, in this case, is driven by the set-point differential pressure. In other words, a class II flow controller with a starting pressure of 2 psi would always be moved by 2 psi.
Any disturbance force directly translates to an error in this pressure, so disturbance forces must be kept very low compared to the active area of the piston. These disturbance forces can be created by the flow of water past the dynamic restriction, by friction, or even by gravity. A simple class 2 regulator is shown below. In this case, the fixed restriction is formed directly on the piston, although more advanced design have it separate. The dynamic seal is needed to achieve accuracy because leakage cannot be compensated by porting as it can in Class I. This is a challenge since friction from this seal will create hysteresis.
| Advantages | Disadvantages |
| Adjustable | Only starting pressure drives piston |
| Easy to make changes to flow | Seals required to achieve accuracy |
| Bulky compared to flow |
Class II are good for small flows where size is not such an issue, and where adjustment is required.
Class III
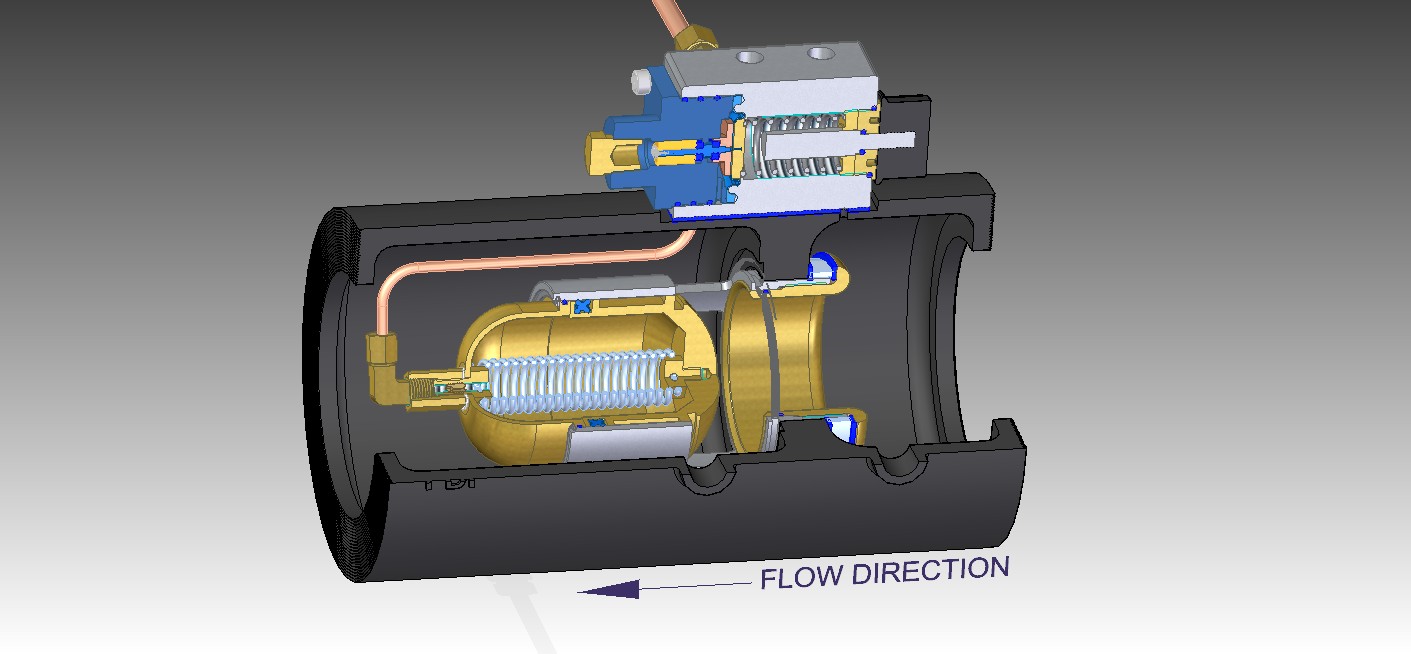
Class III regulators control differential pressure across a restriction much like class II. The difference is that class III use a pilot mechanism to control the motion of a larger restricting mechanism. As a result, they can be much more accurate for a given set-point. For instance, Equalizer (patent applied for) is a Class III regulator. A pilot mechanism sends either P1 or P3 to the main mechanism, based on the controlled pressure difference (P1-P2). The result is that as long as the pressure difference is enough to move the main mechanism, the accuracy is only a matter of how accurate the pilot device is. In class II, any friction would directly create an error based on how it compares with the controlled pressure differential. The result is a device with the adjustibility of Class II, but with robustness similar to Class I.

The question will naturally arise how I can refer to a pressure controller as a flow controller. In the end, though, that’s exactly how they are used in these systems. The difference is, a pressure controller is a flow controller where the control orifice is created by the user. The flow is determined by the setting of the pressure, but dynamically it depends more on the resistance of the load. That load can be a control valve, a local circuit, or a branch in a building.